Разработка кинематической схемы проектируемого станка
Разработка кинематической схемы станка обычно начинается с составления эскизных вариантов структурных схем, на которых производится предварительная взаимная увязка движений рабочих органов проектируемого станка, особенно когда чти движения обусловливают формообразование обрабатываемой поверхности. На рис. 366 приведен вариант структурной схемы станка для нарезания зубьев конического колеса, которая отражает взаимосвязи следующих кинематических цепей: главного движения (1—2): подач при рабочем ходе (1—3) и при быстром холостом xодe (через шунт): деления (3 — 4): обката (6 — 4) и качания люльки (3 —5). По выбранному варианту структурной схемы и соответствующему кинематическому расчету, цепей, а также исходя из общей компоновки рабочих органов станка, составляется кинематическая схема. На ней конкретно указывается, из каких механизмов формируется та или иная кинематическая цепь. При этом возможны различные сочетания и группировки промежуточных механизмов в зависимости от принимаемой конструкции станка. 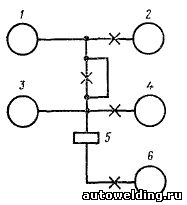
Рис. 366. Структурная схема станка:
1 — двигатель, 2 — инструмент, 3 — барабан, 4 — заготовка, 5 — колесо реверса; 6 — люлька При составлении кинематической схемы станка требуется обеспечить: а) заданную производительность станка, установив соответствующие скорости движения рабочих органов; б) максимальную автоматизацию станка: в) высокий КПД станка (применением передач с короткими кинематическими цепями с малым числом кинематических пар — источником потерь на трение; полным отключением кинематических передач, не участвующих в данный момент в трансформации движения; использованием подшипников качения; применением системы принудительной смазки); г) технологичность конструкции; д) максимальное использование нормализованных, стандартных и унифицированных деталей. Источником движения современных металлорежущих станков, независимо от физической структуры привода, является электродвигатель. Станок может иметь один общий или несколько электродвигателей целевого назначения. В последнем случае упрощаются кинематические цепи, условия управления станком и перевод его на автоматическое действие. Однако не во всех случаях возможно применение коротких кинематических передач с индивидуальными электродвигателями. Движения рабочих органов станка осуществляются главным образом при помощи жестких кинематических связей, но при определенных условиях находят применение также нежесткие связи с отдельными электродвигателями, например, в схеме с так называемым «электрическим валом», когда синхронность движении обеспечивается электрическим путем. В качестве привода главного движения обычно используют трехфазные односкоростные асинхронные электродвигатели переменного тока с короткозамкнутым ротором типов А и АО, которые надежнее других электродвигателей в эксплуатации, дешевле и не требуют применения преобразующих установок. Для расширения диапазона регулирования скорости движения рабочего органа с ганка иногда применяют двух- и, реже, трех- и четырехскоростные электродвигатели, которые путем изменения числа пар полюсов позволяют получить смещение диапазона регулирования. Самым распространенным типом привода в металлорежущих станках средних размеров является привод с механическим регулированием скоростей, состоящий из односкоростного электродвигателя переменного тока и коробки скоростей. В приводах движения подачи и других, помимо асинхронных электродвигателей переменного тока, применяют электродвигатели постоянного тока, преимущественно с параллельным возбуждением. Хотя они требуют преобразующих установок, значительно сложнее, дороже, больше по размерам и менее надежны в эксплуатации, чем двигатели переменного тока, однако возможность бесступенчатого регулирования частоты вращения в широком диапазоне в отдельных случаях делает их незаменимыми. Главным недостатком ступенчатых приводов является невозможность бесступенчатого регулирования скорости, что может снижать производительность станка. В металлорежущих станках для бесступенчатого регулирования скоростей главного движения и подач находят применение бесступенчатые фрикционные передачи (вариаторы), конструкции которых весьма разнообразны. Механические вариаторы имеют, как правило, небольшой. .Диапазон регулирования (4 — 8) и рассчитаны на передачу мощности 2—10 кВт. При выборе вариатора для конкретного случая необходимо учитывать диапазон регулирования, передаваемую мощность, удобство управления и др. Следует отметить, что бесступенчатое регулирование не имеет больших преимуществ перед ступенчатым при низких значениях знаменателя ряда (φ ≤ 1,26). Компоновка механизмов привода может быть выполнена в двух вариантах: когда коробка скоростей и шпиндельный узел располагаются в одном корпусе и когда они выполняются в виде отдельных узлов (раздельный привод). Тот или другой вариант выбирают после сравнения технико-экономических показателей и исходя из конструктивных особенностей проектируемого станка. Преимущества привода, расположенного в одном корпусе, заключаются в меньшей стоимости и возможности концентрации органов управления; недостатками являются вибрации, передающиеся на шпиндель, и трудность применения ременной передачи. Достоинства раздельного привода: вибрации механизмов коробки скоростей не передаются шпиндельному узлу; уменьшается нагрев шпиндельного узла; шпиндель разгружается от натяжения ремня; расширяется возможность унификации и нормализации отдельных узлов привода с применением их в станках различных типов и размеров; улучшаются условия сборки, ремонта и модернизации станка. Немаловажное значение имеет выбор типа последней передачи на шпиндель, стол и т. д., которая оказывает существенное влияние на плавность движения. Для обеспечения плавного вращения шпинделя и во избежание сильного шума окружная скорость зубчатых колес не должна превышать определенных предельных значений, а диаметр зубчатых колес, установленных на шпинделе, желательно иметь меньше, чем максимальный диаметр обрабатываемой поверхности. В станках с высокими требованиями к шероховатости обрабатываемой поверхности и с большой частотой вращения шпинделя применяют ременную передачу непосредственно на шпиндель. Диаметр шкива при этом должен быть не менее максимального диаметра обработки. Оптимальный вариант кинематики станка выбирают согласно построению различных вариантов структурных сеток. Колев Н.С. "Металлорежущие станки". -M, Машиностроение, 1980
|